Inspiration
Tie A Knot
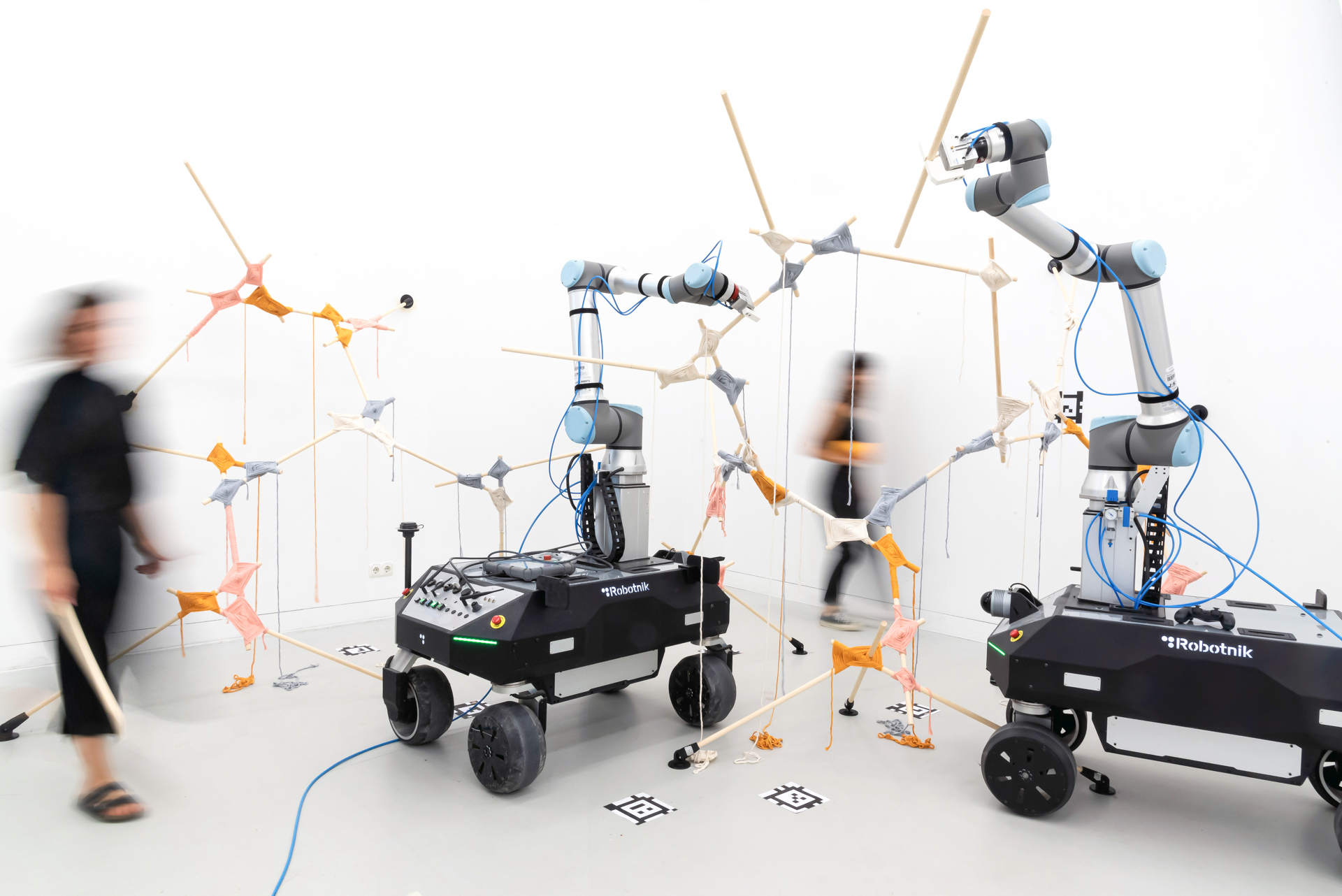
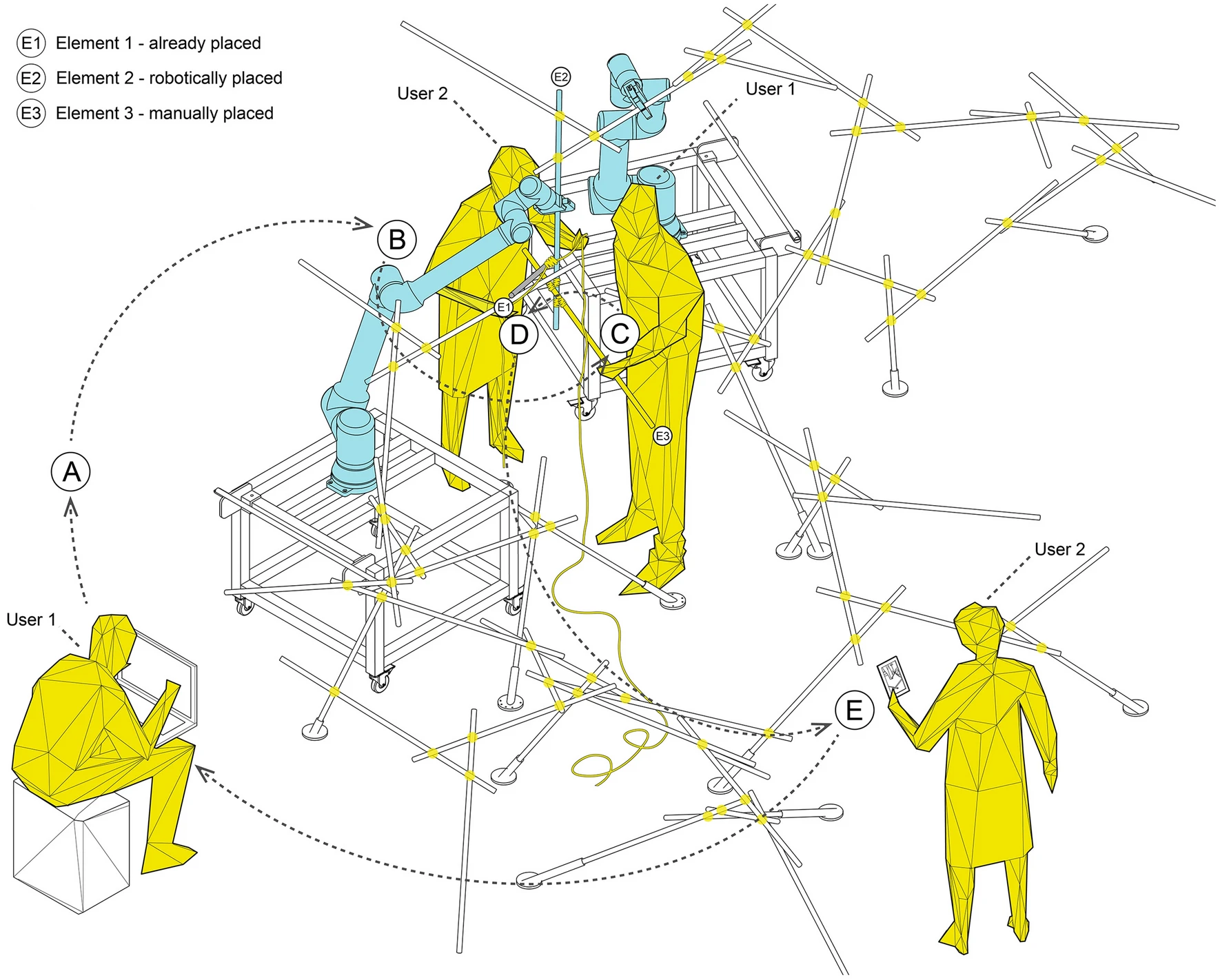
Tie a knot is an experimental study that introduces a set of digital tools and workflows that enables a novel human–robot cooperative workflow for assembling a complex wooden structure with rope joints. The system is designed for a dually augmented human–robot team involving two mobile robots and two humans, facilitated by a shared digital-physical workspace. In this shared workspace, digital spatial data informs humans about the design space and fabrication-related boundary conditions for decision-making during assembly. As such, humans can manually place elements at locations of their choice, following a set of design rules that affect the gradual evolution of the structure. In direct response to such manually placed elements, the cooperating robots can continue the assembly cycle by precisely placing elements and stabilizing the overall structure.

Future Tree, Esslingen, 2017-2019
The crown of the Future Tree is a timber structure made of 380 timber elements forming a reciprocal frame, supported by the concrete column, anchored to the building on two sides and cantilevering on the opposite corner. The frame’s geometry is informed by its structural behaviour, differentiating its flexural rigidity by playing with the opening of the reciprocal knots to achieve a higher stiffness in the cantilevering part. To integrate geometric, structural and fabrication concerns we developed a custom computational model of the design. The structure is made of acetylated pine wood, full threaded screws and tension cables. The timber elements have been fabricated and assembled using an industrial robot.
Credits: Gramazio Kohler Research, ETH Zurich


